

发布时间:2024-03-11文章来源:jjb测速
(MMC)因具有易扩展、功率器件容量大、谐波含量低等特质而成为光伏发电领域的新研究。本文介绍了中通过DC/DC变换器并联一组光伏阵列,系统控制是电压外环提供与电网同步的参考电流,电流内环则实现并网电流的调节,MPPT则采用电导增量法实现,从而得到每一个的参考电压,阀级控制采用正弦载波移相脉宽调制(CPS-SPWM)来调制MMC,利用仿线电平的MMC光伏并网模型。根据结果得出:基于MMC的光伏并网系统在子模块独立控制下成功并网行,而且具有电网谐波少、光伏能源利用率高的优势。
关键词:模块化多电平换流器;光伏并网;上限功率点跟踪;子模块;PSCAD/EMTDC
目前,新能源发电技术已成熟,随着可再次生产的能源产业的迅速发展,光伏发电所占比例慢慢的变大,电力系统对光伏发电提出了更高的要求,提高并网逆变器容量、加强光伏发电效率将是今后光伏并网的研究重点[1]。
目前最常用的逆变器为二电平或者三电平,适用于低电压场所,而且对于功率器件损耗较大。为了更好的提高太阳能利用率,使其工作在上限功率状态,许多学者都致力于研究光伏阵列上限功率跟踪(maximum powerpoint tracking,MPPT)技术,对于逆变器拓扑结构的研究较少[2]。模块化多电平技术发展迅速,将级联式多电平拓扑结构与分布式发电相结合慢慢的变成为热门。针对这样的一种情况,许多研究人员都在从事模块化多电平换流器(MMC)的研究,文献[3-5]针对MMC展开了一系列研究,可是并没有应用在光伏并网系统;文献[6-7]把MMC应用到了光伏并网系统,但是其仿真模型都是在Matlab/Simulink上搭建的,具有局限性;文献[8]提出将MMC 运用在低压集中式并网模式的光伏系统中,并把双闭环控制与上限功率点跟踪技术结合在一起,但是对MMC 研究不够深入,而且拓扑结构单一。
所以,未解决大型光伏并网发电系统目前所存在的以上问题,本文提出一种基于MMC子模块独立控制的光伏并网系统,对MMC与光伏阵列结合的子模块拓扑结构可以进行了详细的介绍和分析,着重研究了新型子模块的的原理和控制方式,把本文设计的MMC新型子模块与一般MMC子模块对比,说明其特点。通过这种结构,能大大的提升光伏阵列的太阳能利用率,满足对每一个光伏阵列的单独控制、适合高电压等级的要求,而且对电网的谐波污染少,最后通过PSCAD/EMTDC仿真软件验证了该系统的有效性。
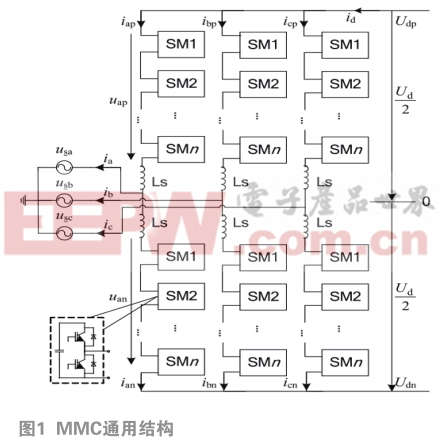
MMC拓扑通用结构如图1所示。本文设计的MMC总体三相结构跟传统MMC一样,由3个相单元构成,每个相单元包含两个上下桥臂以及上下换流电抗L,总共6个桥臂,1个桥臂由N个子模块级联构成。目前常见的子模块有是半桥型子模块、全桥型子模块和双箝位型子模块。其中半桥型子模块应用最广泛。所以本文基于半桥型子模块设计一种将光伏阵列、DC/DC变换电路和SM 组成的MMC子模块拓扑,命名为PSM,其拓扑结构如图2所示。
本文提出的PSM拓扑结构跟一般PSM不同的是;在每一个子模块中,PSM出口端并联了一个由IGBT和大电阻R组成的旁路,在AB端口处并联了一个高速开关K1和一个晶闸管K2。当子模块出现故障时,K1闭合用于保护子模块,K2用于保护D2。DC/DC变换电路与SM之间并联1个大电容,当电压过大或者MMC闭锁时,IGBT导通,使大电阻R用于电容的缓慢放电。
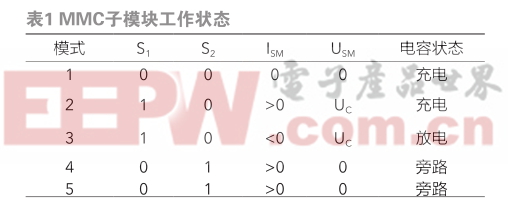
正常工作状态下,保护电路并不会起作用。其中DC-DC电路用于追踪光伏阵列上限功率点,系统运行之前,光伏阵列经DC-DC电路给电容预充电,当电容电压都达到预定值后解锁各子模块。设ISM电流流入方向为正,根据电流 ISM的方向以及开关S1和S2的状态,子模块的输出电压在UC和 0 之间切换。具体的开关状态由表 1 可见,其中“1”代表开关导通,“0”代表开关关断。
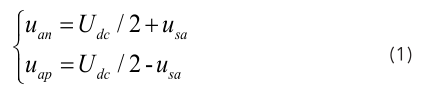
以A相为例对MMC逆变器的原理进行阐述。先不考虑电抗L的作用,uap和uan分别为上、下桥臂直流侧电压,直流侧的正负母线相对于参考点o的电压分别为Udc/2和-Udc/2,usa为A相交流输出侧的电压,得到公式
为了维持直流电压的稳定,每个相单元中投入的子模块数量是相等且不变的,由此可得

以本文所搭建的9电平MMC逆变器为例,在每个桥臂上串联8个子模块.为了可以使逆变器输出的波形接近正弦波,单相桥臂的投入模块个数按照正弦规律变化,且上下桥臂子模块对称互补投入,设输出电平数Nlevel和桥臂模块数N,满足下面公式:

图3给出了PSCAD软件中搭建的Boost电路以及MPPT控制,由光伏阵列、DC/DC变换电路组成。
为了实现光伏阵列上限功率点的追踪控制,本文采用电导增量法MPPT控制[9]改变Boost电路中晶闸管的占空比D,使光伏的输出电压与在上限功率点处的电压相等,这里不再赘述,控制过程如图4所示。
其中MV和MI分别为电压调制比和电流调制比,由于MPPT控制稳定了子模块的电容电压,在三相自然对称的工况下,又可以推导出桥臂输出电压公式为:
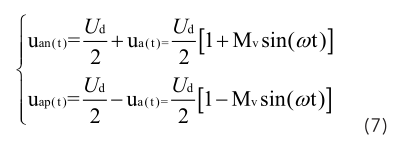
以A相为例验证,在本文所提的MMC拓扑结构中,A相上、下桥壁的输出电压符合公式(6),又因为MMC换流器6个桥臂工作原理和电气状态一致,所有桥臂都遵循自然平衡的规律。因此,各桥臂之间不再附加平衡控制。
本文设计的MMC并网控制框图如图6所示,整体控制是基于电压外环控制和电流内环控制。电压外环主要负责为电流内环采取与电网同相位的参考电流Iref,其幅值由直流侧电压参考值Uref与实际电压Upv相减再经过比例积分环节得到,相位能够最终靠PLL跟踪网侧电压得到。电流内环最大的作用是控制逆变器输出电流Ig尽可能向参考值Iref靠近。
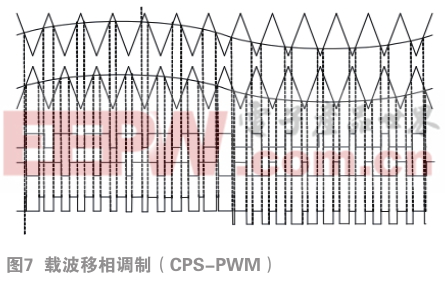
阀级采用的调制方式为载波移相调制策略[8](CPS-PWM)。调制原理如图7所示。
调制流程为:对于每个桥臂中的N个子模块,采用相同开关频率的SPWM,使它们对应的三角载波依次移开1/N三角载波周期,即每一个子模块三角波之间相差2π/N 相位角,然后应使上、下 2 个桥臂的调制波相差180°,再让每一个子模块的载波与对应的调制波作比较,产生出N组PWM调制波信号,这样在任意时刻每个相单元中上、下 2 个桥臂被触发投入的模块个数互补且为N,保证了在任意时刻每个相单元都有 N 个子模块投入。各相桥臂调制波的相角参考见表2所示:
本文利用PSCAD/EMTDC电力系统电磁暂态仿线]搭建了一个基于MMC子模块控制的光伏并网模型,每一相电压为8个子模块构成的9电平。仿线 s,设置直流侧参考电压为4 kV,每一个子模块中光伏阵列的参数见图8。
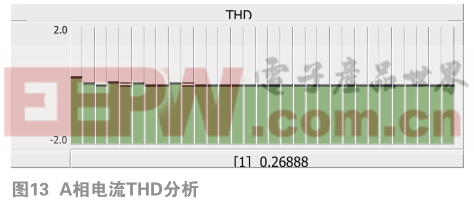
本文对MMC与光伏阵列相结合的拓扑结构可以进行了详细分析,对其中所有的环节的控制策略进行了详细的说明,并在PSCAD/EMTDC仿线电平的仿真模型来做验证,仿真根据结果得出,输出电压由多个PSM模块输出电压叠加而成,可通过增减PSM模块适应多电压等级需求环境,与传统的两级逆变并网结构相比更具有灵活性。另外,经过本文子模块独立控制策略的并网系统能够同时完成MPPT控制和并网电流控制,输出电流为多电平,谐波含量低,减小了对接入电网的谐波污染,适用大电容、高电压的场合,双闭环的控制策略切实有效。

热线电话 010-82894896/4112-6618 E-mail:ales@epever.com
Copyright© jjb测速-竞技宝官方测速入口 All rights reserved.
京ICP备09056840号-3
 京公网安备 京ICP备09056840号-3
京公网安备 京ICP备09056840号-3


 企业微信X
企业微信X
 视频号X
视频号X
 公众号X
公众号X